Потенциальная энергия. Консервативные и неконсервативные силы.
Потенциальная энергия —скалярная физическая величина, представляющая собой часть полной механической энергии системы, находящейся в поле консервативных сил. Потенциальная энергия определяется взаимным положением тел (например, положением тела относительно поверхности Земли). Понятие потенциальной энергии можно ввести только для сил, работа которых не зависит от траектории движения и определяется только начальным и конечным положениями тела. (P.S.: (простыми словами)- это вид энергии, которой обладает тело, благодаря его положению на определенной высоте в гравитационном поле Земли. Потенциальной энергией также является энергия, запасенная в такой системе, как сжатая пружина, или в колеблющейся системе, например, в маятнике).
Единицей измерения энергии является джоуль.
Wп — Потенциальная энергия тела, энергия положения (Джоуль),
G — гравитационная сила (Ньютон),
m — масса тела (кг),
h — высота на которую поднято тело (метр)
g — ускорение свободного падения= 9.81 (м/c 2 )
В физике консервати́вные си́лы (потенциальные силы) — это силы, работа которых не зависит от вида траектории, точки приложения этих сил и закона их движения, и определяется только начальным и конечным положением этой точки. Равносильным определением является и следующее: консервативные силы — это такие силы, работа которых по любой замкнутой траектории равна 0.
 A 1a2 = A 1b2 = A 1l2 = A 12
A 1a2 = A 1b2 = A 1l2 = A 12 
Примерами консервативных сил являются: сила тяжести, сила упругости, сила кулоновского (электростатического) взаимодействия. Если в системе действуют только консервативные силы, то механическая энергия системы сохраняется. Консервативная сила всегда направлена в сторону уменьшения потенциальной энергии.
Неконсервативные силы – силы, работа которых зависит от траектории движения тела. Работа неконсервативных сил, в отличие от консервативных, зависит от формы пути. Неконсервативные силы могут совершать как положительную, так и отрицательную работу(не равняются нулю). К неконсервативным силам, совершающим отрицательную работу, относятся, например, силы трения и сопротивления при движении тела в жидкости или газе. Это обусловлено тем, что направление действия этих сил и направление перемещения тела противоположны.
10 Закон сохранения механической энергии
Механическая энергия консервативной механической системы сохраняется во времени. Проще говоря, при отсутствии диссипативных сил (например, сил трения) механическая энергия не возникает из ничего и не может никуда исчезнуть.
Для замкнутой системы физических тел, например, справедливо равенство
Ek1 + Ep1 = Ek2 + Ep2,
где Ek1, Ep1 — кинетическая и потенциальная энергии системы какого-либо взаимодействия, Ek2, Ep2 — соответствующие энергии после.
Закон сохранения энергии — это интегральный закон. Это значит, что он складывается из действия дифференциальных законов и является свойством их совокупного действия.Формулировка закона сохранения механической энергии.
Полная механическая энергия, т.е. сумма потенциальной и кинетической энергии тела, остается постоянной, если действуют только силы упругости и тяготения и отсутствуют силы трения.Энергия, в самом общем понимании, является одной из функций состояния тела. Состояние тела определяется его массой, положением относительно других тел, скоростью и другими параметрами.
Чтобы изменилась кинетическая или потенциальная энергия тела, какой-то силой должна быть совершена работа: A = E2 – E1.
Рассмотрим изолированную систему, в которой телам предоставлена возможность двигаться под действием внутренних сил. В качестве простейшего примера возьмем свободно падающее тело. На высоте h1 тело обладает и кинетической, и потенциальной энергией. При перемещении на высоту h2 сила тяжести совершает работу, равную  Вся эта работа идет на изменение кинетической энергии тела:
Вся эта работа идет на изменение кинетической энергии тела: 
Так как равны левые части записанных уравнений, равны и правые части: 
После перегруппировки членов полученного уравнения, имеем: 
Сумма потенциальной и кинетической энергии системы тел называется полной механической энергией системы: W = Ek + Ep.
Согласно полученному выражению, в изолированной системе тел полная механическая энергия остается постоянной, в системе могут лишь происходить превращения энергии из одного вида в другой.
Дата добавления: 2019-02-22 ; просмотров: 965 ; Мы поможем в написании вашей работы!
Физика Б1.Б8.
Электронное учебное пособие по разделу курса физики Механика
Механика – это раздел физики, который изучает наиболее простой вид движения материи – механическое движение и причины, вызывающие или изменяющие это движение.
Механика состоит из трех разделов: кинематики, динамики и статики. Кинематика дает математическое описание движения, не касаясь причин, которыми вызвано движение. Динамика – основной раздел механики, она изучает законы движения тел и причины, которыми вывзывается движение и его изменение. Статика изучает законы равновесия системы тел под действием приложенных сил. Мы ограничимся изучением двух основных разделов – кинематики и динамики.
Введение
Механика – это раздел физики, который изучает наиболее простой вид движения материи – механическое движение и причины, вызывающие или изменяющие это движение.
Механическое движение – это изменение во времени взаимного расположения тел или частей одного и того же тела. Причиной, вызывающей механическое движение тела или его изменение, является воздействие со стороны других тел.
Развитие механики началось еще в древние времена, однако, как наука она формировалась в средние века. Основные законы механики установлены итальянским физиком и астрономом Г. Галилеем (1564-1642) и английским ученым И. Ньютоном (1643-1727).
Механику Галилея-Ньютона принято называть классической механикой. В ней изучается движение макроскопических тел, скорости которых значительно меньше скорости света с в вакууме. Законы движения тел со скоростями, близкими к скорости света сформулированы А. Эйнштейном (1879-1955), они отличаются от законов классической механики. Теория Эйнштейна называется специальной теорией относительности и лежит в основе релятивистской механики. Законы классической механики неприемлемы к описанию движения микроскопических тел (элементарных частиц – электронов, протонов, нейтронов, атомных ядер, самих атомов и т.д.) их движение описывается законами квантовой механики.
Механика состоит из трех разделов: кинематики, динамики и статики. Кинематика дает математическое описание движения, не касаясь причин, которыми вызвано движение. Динамика – основной раздел механики, она изучает законы движения тел и причины, которыми вывзывается движение и его изменение. Статика изучает законы равновесия системы тел под действием приложенных сил. Мы ограничимся изучением двух основных разделов – кинематики и динамики.
В механике для описания движения в зависимости от условий решаемой задачи пользуются различными упрощающими моделями: материальная точка, абсолютно твердое тело, абсолютно упругое тело, абсолютно неупругое тело, и т.д. Выбор той или иной модели диктуется необходимостью учесть в задаче все существенные особенности реального движения и отбросить несущественные, усложняющие решение.
Материальная точка – это тело обладающее массой, размеры и форма которого несущественны в данной задаче. Любое твердое тело или систему тел можно рассматривать как систему материальных точек. Для этого любое тело или тела системы нужно мысленно разбить на большое число частей так, чтобы размеры каждой части были пренебрежимо малы по сравнению с размерами самих тел.
Абсолютно твердое тело – это тело, расстояние между любыми точками которого остается неизменным в процессе движения или взаимодействия. Эта модель пригодна, когда можно пренебречь деформацией тел в процессе движения.
Абсолютно упругое и абсолютно неупругое тело – это два предельных случая реальных тел, деформациями которых можно и нельзя пренебречь в изучаемых процессах.
Любое движение рассматривается в пространстве и времени. В пространстве определяется местоположение тела, во времени происходит смена местоположений или состояний тела в пространстве, время выражает длительность состояния движения или процесса. Пространство и время –это два фундаментальных понятия, без которых теряется смысл понятия движения: движения не может быть вне времени и пространства.
Лекция №4. Работа, мощность, энергия
3.1. Работа постоянной и переменной силы. Мощность.
Работа − это количественная характеристика процесса обмена энергией между взаимодействующими телами.
Если тело движется прямолинейно и на него действует постоянная сила, то работа этой силы равна скалярному произведению вектора силы на вектор перемещения:

где α − угол между направлением действия силы и направлением перемещения. Работа измеряется в [ Дж]. 1 Дж − это работа, совершаемая силой в 1 Н на пути в 1 м.
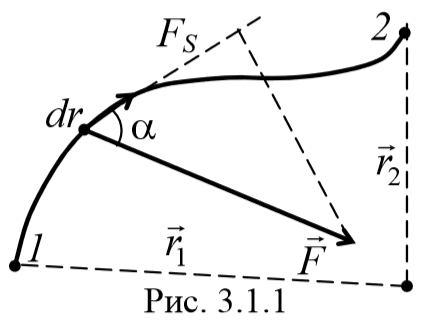
В случае переменной силы водится понятие элементарной работы dA , равной скалярному произведению вектора силы F и вектора элементарного перемещению dr

где Fs − проекция силы на касательную к траектории (рис. 3.1.1).
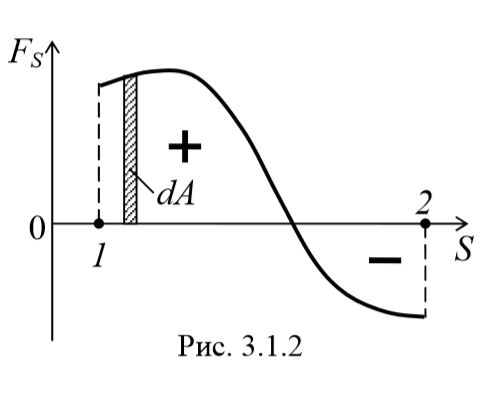
Работа, совершаемая силой на конечном участке пути 1 − 2, равна сумме элементарных работ на отдельных бесконечно малых участках пути (рис. 3.1.2). Она определяется интегралом, вычисленным вдоль участка 1−2 траектории:
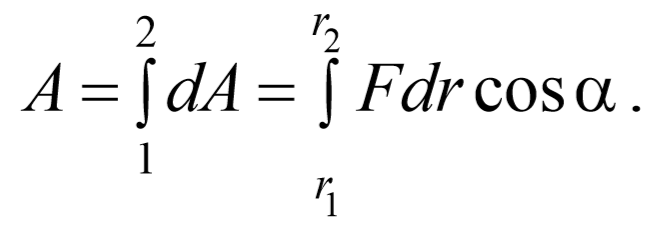
Если изобразить график зависимости проекции силы на касательную к траектории от перемещения, то выражение (3.1.3) имеет смысл площади фигуры под кривой.
Для характеристики скорости работы существует мощность. Средняя мощность равна отношению работы к промежутку времени, в течение которого эта работа производится:
Мгновенная мощность , т. е. мощность в данный момент времени определяется как
т. е. равна скалярному произведению вектора силы на вектор скорости, с которой движется точка приложения этой силы.
За единицу мощности принимается мощность в 1 Вт, при которой в единицу времени 1 с совершается работа в 1 Дж.
3.2. Кинетическая энергия. Теорема об изменении кинетической энергии.
Рассмотрим понятие кинетической энергии тела. Пусть тело массой m движется поступательно под действием некоторой силы F=m(d υ /dt) (или результирующей нескольких сил). Найдем элементарную работу, которую совершает эта сила на элементарном перемещении d r = υ dt

Отсюда видно, что работа силы F идет на приращение некоторой величины (стоящей в скобках), которую называют кинетической энергией тела. Таким образом, кинетическая энергия − это энергия тела, обусловленная его механическим движением.
Для тела массой m двигающегося поступательно со скоростью υ кинетическая энергия определяется соотношением
Проинтегрировав выражение (3.2.1) от начальной до конечной скорости получим теорему об изменении кинетической энергии

т. е. приращение кинетической энергии тела на некотором перемещении равно работе результирующей всех сил, действующих на тело на том же перемещении.
3.3. Консервативные и неконсервативные силы.
Все силы в механике делятся на консервативные и неконсервативные силы .
В общем случае работа, определяемая выражением (3.1.3), зависит от траектории, которую описывает точка приложения силы. Однако существуют силы (тяготения, тяжести, упругости, электростатические и др., которые являются центральными), работа которых не зависит от формы траектории, а зависит только от начального и конечного положения движущейся точки. Такие силы называются консервативными, а их работа по замкнутому контуру равна нулю
Если работа силы зависит от формы траектории, которую описывает точка приложения силы, то такие силы называются неконсервативными, а их работа по замкнутому контуру не равна нулю
Среди неконсервативных сил выделяют диссипативные и гироскопические силы.
1) Диссипативные силы . К ним относятся, в частности, силы трения и силы сопротивления среды. Полная работа этих сил является отрицательной.

При наличии сил трения и сопротивления энергия механической системы уменьшается, переходя во внутреннюю энергию тел, что приводит к их нагреванию. Такой процесс называют диссипацией энергии, а силы называют диссипативными . Таким образом, сила называется диссипативной, если работа, совершаемая этой силой, зависит от траектории движения тела.
2) Гироскопические силы . Эти силы зависят от скорости движения материальной точки и действуют перпендикулярно к этой скорости. Работа таких сил всегда равна нулю, однако от консервативных сил они отличаются тем, что определяются не только положением точки, но и ее скоростью. Примером такой силы является сила Лоренца. Сила Лоренца − это сила, действующая на заряженную частицу q , движущуюся со скоростью υ , в магнитном поле индукции B
3.4. Потенциальная энергия. Связь между силой и энергией потенциального поля.
Важнейшей составной частью механической энергии является потенциальная энергия , которая определяется как часть общей механической энергии системы, зависящей от взаимного расположения материальных точек системы и их положения во внешнем силовом поле. Из определения следует, что потенциальная энергия системы не должна зависеть от того, каким образом данная конфигурация частиц системы возникла. Это значит, что понятие потенциальной энергии имеет смысл лишь в том случае, когда на материальные точки системы действуют только консервативные силы. Изменение потенциальной энергии системы должно определяться только работой консервативных сил. Другими словами, работа консервативных сил при переходе из состояния 1 в состояние 2 равна убыли потенциальной энергии
Таким образом, силовое поле консервативных сил является потенциальным полем.
Полем сил называют область пространства, в каждой точке которого на помещенную туда частицу действует сила, закономерно меняющаяся от точки к точке. Примером может служить поле силы тяжести Земли или поле сил сопротивления в потоке жидкости (газа). Если сила в каждой точке силового поля не зависит от времени, то такое поле называют стационарным . Ясно, что силовое поле, стационарное в одной системе отсчета, в другой системе может оказаться и нестационарным. В стационарном силовом поле сила зависит только от положения частицы.
Стационарное силовое поле, в котором работа силы поля на пути между двумя любыми точками не зависит от формы пути, а зависит только от положения этих точек, называется потенциальным , а силы, как уже было сказано выше − консервативными. Если это условие не выполняется, то силовое поле не является потенциальным. Силовое поле представляет собой особую форму существования материи, посредством которой осуществляются гравитационное, электромагнитное, ядерное и другие взаимодействия.
Взаимодействие в консервативной системе может быть описано с помощью потенциальной энергии либо с помощью сил взаимодействия точек системы. Поэтому между потенциальной энергией и силой, действующей на материальную точку, должна существовать определенная взаимосвязь. Потенциальная энергия системы является функцией координат П(x,y,z) . Пусть силы, действующие на систему, выполнили элементарную работу

С другой стороны, используя уравнение (3.4.1)

Сравнивая выражения (3.4.2) и (3.4.3), получим выражения для проекций сил поля

Для вектора силы получаем следующее выражение

Смысл градиента станет нагляднее и яснее, если ввести понятие эквипотенциальной поверхности − поверхности, во всех точках которой потенциальная энергия П имеет одно и то же значение. Каждому значению П соответствует своя эквипотенциальная поверхность. Из формул (3.4.4) следует, что проекция вектора на любое направление, касательное к эквипотенциальной поверхности в данной точке, равна нулю. Это значит, что вектор нормален эквипотенциальной поверхности в данной точке. Далее, возьмем перемещение в сторону уменьшения П, тогда П F противоположен по направлению вектору grad П, то приходим к выводу, что градиент П − это вектор, направленный по нормали к эквипотенциальной поверхности в сторону возрастания потенциальной энергии П.
3.5. Гравитационное поле. Работа в гравитационном поле.
Рассмотрим более подробно понятие поля сил. Опыт показывает, что в случае гравитационных взаимодействий сила, действующая на тело (А) массой m со стороны окружающих тел (В), пропорциональна массе. Эта сила может быть представлена в виде произведения двух величии:
где G − некоторый вектор (для гравитационных сил вблизи поверхности Земли он совпадает с вектором ускорения свободного падения), зависящий как от положения тела (А) массой m , так и от свойств окружающих тел (В).
Такое представление силы открывает возможность иной физической интерпретации взаимодействия, связанной с понятием поля. В этом случае говорят, что система тел (В) окружающих тело массой m создает в окружающем пространстве поле, характеризуемое вектором G ( r ) . Иначе можно сказать, что в каждой точке пространства система тел (В) является источником поля и создает такие условия, при которых тело массой m , помещенное в это поле, испытывает действие силы (3.5.1). Причем считают, что поле существует безотносительно к тому, есть ли в нем тело (А) или нет. При переходе к переменным полям выясняется, что понятие поля имеет глубокий физический смысл: поле есть физическая реальность.
Вектор G ( r ) называют напряженностью поля . Если поле образовано несколькими источниками, результирующее поле равно сумме полей, созданных каждым из них. Это утверждение является одним из важнейших свойств полей и напряженность G результирующего поля в произвольной точке
где G i − напряженность поля соответствующего источника в этой же точке, N − число источников поля.
Формула (3.5.2) выражает так называемый принцип суперпозиции (или наложения) полей, который является отражением опытных фактов и дополняет законы механики.
Обратимся теперь к потенциальной энергии тела. Согласно формулам (3.4.1) и (3.5.1), можно записать
Поделим обе части этого уравнения на m
и обозначив П/m=φ , получим
Введенная величина φ( r ) называется потенциалом поля в точке с радиус-вектором r .
Формула (3.5.6) позволяет найти потенциал гравитационного поля. Для этого достаточно вычислить интеграл по произвольному пути между точками 1 и 2 и представить затем полученное выражение в виде убыли некоторой функции, которая и есть потенциал φ( r ) . Так, потенциал гравитационного ноля точечной массы m
Потенциал гравитационного поля является энергетической характеристикой поля. Потенциал поля тяготения − это скалярная величина, определяемая потенциальной энергией тела единичной массы в данной точке поля, или работой по перемещению единичной массы из данной точки поля в бесконечность.
В случае, когда поле создается многими источниками, то результирующий потенциал равен
где φ i − потенциал, создаваемый i − телом в данной точке поля; N − число источников поля.
Потенциал, как и потенциальная энергия, может быть определен только с точностью до прибавления некоторой произвольной постоянной, также совершенно несущественной. Поэтому ее обычно опускают, полагая равной нулю. Таким образом, поле можно описывать или в векторном виде G ( r ) , или в скалярном φ( r ) . Оба способа эквивалентны.
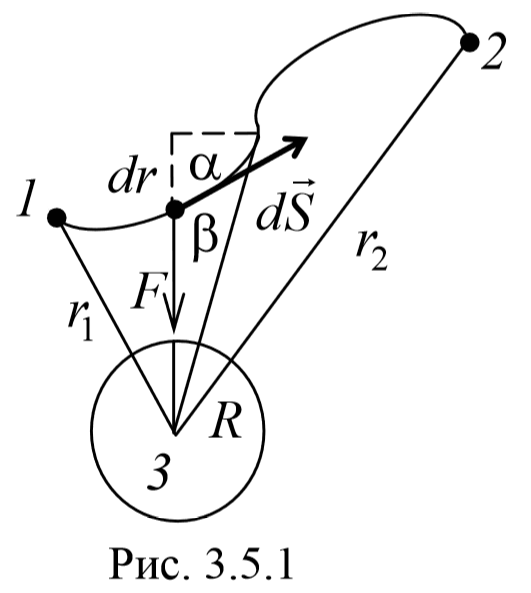
Определим работу, совершаемую силами гравитационного поля Земли при перемещении в нем материальной точки массой m . При перемещении материальной точки на расстояние dS совершается работа

На некотором расстоянии r , согласно закону всемирного тяготения, на тело действует сила
Подставляя (3.5.10) в (3.5.9) и интегрируя в пределах от r1 до r2 , получим

Знак «минус» появляется потому, что направления перемещения и силы противоположны. Из формулы (3.5.10) вытекает, что затраченная работа в поле тяготения не зависит от траектории перемещения, а определяется лишь начальным и конечным положением материальной точки. Следовательно, силы тяготения являются консервативными силами , а поле тяготения является потенциальным . Сравнивая (3.5.11) с (3.4.1) получим, что потенциальная энергия в поле тяготения Земли равна
3.6. Закон сохранения механической энергии.
Пусть на материальные точки системы действуют только консервативные силы. Тогда при переходе системы из одного состояния работа консервативных сил равна

Из (3.6.1) получаем, что

Величину E=K+П называют полной механической энергией системы.
Из соотношения (3.6.2) следует закон сохранения полной механической энергии: полная механическая энергия системы, на материальные точки которой действуют только консервативные силы, с течением времени не изменяется:
Если на систему действуют помимо консервативных сил еще и неконсервативные силы то

а работа консервативных сил равна

Тогда с учетом формулы (3.6.5), выражение (3.6.4) примет следующий вид

В этом случае изменение полной механической энергии системы равно работе неконсервативных сил.

Таким образом, в системе, в которой кроме консервативных сил, действуют также неконсервативные силы, полная механическая энергия системы не сохраняется, и закон сохранения механической энергии не выполняется. Но всегда возникает эквивалентное количество энергии другого вида взамен механической энергии, т. е. выполняется фундаментальный закон сохранения и превращения энергии. Энергия никогда не исчезает и не появляется вновь, она лишь превращается из одного вида в другой.
Консервативные диссипативные и гироскопические силы
По влиянию на энергию системы и виду совершаемой работы все силы условно можно разделить на три вида:
- консервативные;
- диссипативные.
- гироскопические;
Консервативные силы
Консервативные силы зависят только от взаимного положения взаимодействующих тел.
Примеры консервативных сил:
- Сила упругости;
- Сила взаимодействия электрических зарядов (Сила Кулона);
- Сила всемирного тяготения и сила тяжести.
Как видно из примеров, консервативные силы – это силы притяжения, или отталкивания.
Когда действуют консервативные силы, есть потенциальная энергия взаимодействия. Поэтому, консервативные силы часто называют потенциальными силами.
Потенциальная энергия – это энергия взаимного действия – притяжения, или отталкивания.
Для консервативной силы потенциальная энергия зависит только от расстояния между двумя взаимодействующими телами.
Примечание: Когда в системе действуют только консервативные силы, то в такой системе полная механическая энергия сохраняется (консервируется).
Свойство потенциальной энергии взаимодействия
Сначала нужно выбрать точку, относительно которой будем рассчитывать потенциальную энергию. И только потом относительно этой точки измерять потенциальную энергию. Выбрав другую точку отсчета, получим другую величину энергии.
Поэтому уточняют, что тело, поднятое над землей, имеет потенциальную энергию 20 Джоулей именно относительно поверхности земли. Относительно пола подвала потенциальная энергия этого тела будет больше, а относительно крыши гаража – меньше.
Работа консервативных сил
Работа консервативной силы, действующей на тело, равна уменьшению потенциальной энергии тела.
Будьте внимательны: работа равна именно уменьшению потенциальной энергии! Об этом говорит знак «минус» перед скобкой в формуле:
( E_
( E_
( A left( text <Дж>right)) – работа консервативной силы.
Примечание: Поэтому, вектор консервативной силы направлен в сторону убывания потенциальной энергии.
Свойства работы консервативных сил
Работа консервативных сил не зависит от траектории, по которой тело перемещалось из начальной точки в конечную. Работа таких сил зависит только от разницы расстояния между двумя взаимодействующими телами!
Если тела сблизились – работа положительна, если одно тело удалилось от другого — работа отрицательная.
Работа консервативных сил по перемещению тела будет равна нулю, если тело будет двигаться так, что к концу своего движения вернется в первоначальную точку.
Физики говорят: «Работа консервативной силы по замкнутому пути отсутствует», или «Консервативная сила работу на замкнутом пути не совершает».
Примечание:
Предположим, что мы измерили работу какой-либо силы на замкнутой траектории и эта работа оказалась нулевой. Совсем не обязательно, что эту силу можно назвать консервативной.
Работа по замкнутому пути бывает нулевой не только для консервативной силы! Есть еще гироскопические силы. Они, так же, не совершают работу по перемещению тела, в том числе, когда тело движется по замкнутой траектории.
Сила тяжести – это консервативная сила. Почитайте, как рассчитать работу силы тяжести.
Гироскопические силы
Гироскопические силы, действующие на тело, зависят от скорости тела и его положения в пространстве. При этом, гироскопические силы всегда перпендикулярны скорости.
Свое называние эти силы получили потому, что они встречаются в теории гироскопа. Гироскоп – прибор, содержащий быстро вращающееся тело. Оно стремится сохранить неизменной ось своего вращения.
Примером простейшего гироскопа может служить волчок (рис. 1), участвующий во вращательном движении.

Примеры гироскопических сил:
- Сила Лоренца;
- Сила Кориолиса;
Примечания:
- Сила Лоренца – это сила, с которой магнитное поле действует на движущуюся в нем заряженную частицу.
- Сила Кориолиса – одна из сил инерции. Если система отсчета вращается, ее вращение влияет на движение тел в ней. Чтобы учесть влияние вращения, француз Гаспар-Густав Кориолис предложил формулу для силы, которую впоследствии назвали в его честь.
Работа гироскопических сил
Гироскопические силы направлены под прямым углом к перемещению тела поэтому, работу не совершают. Это следует из формулы, по которой рассчитываем работу силы.
Из-за такого направления работа гироскопических сил всегда равна нулю. А если нулю равна работа, то мощность, так же, будет равняться нулю. Не важно, как при этом тело перемещается и замкнута ли его траектория.
Примечание: Когда на систему действуют консервативные силы совместно с гироскопическими, полная механическая энергия такой системы не меняется и такую систему можно называть замкнутой.
В замкнутых системах действуют только консервативные и гироскопические силы.
Диссипативные силы
Диссипативные силы уменьшают механическую энергию системы. Происходит преобразование видов энергии, в конце концов, энергия переходит в тепловую и рассеивается в окружающее пространство – теряется (диссипирует).
Примеры диссипативных сил:
- Сила трения (скольжения);
- Сила сопротивления воздуха;
- Сила сопротивления при движении в жидкости.
Диссипирование – преобразование энергии упорядоченных процессов в энергию процессов неупорядоченных.
Работа диссипативных сил
Закон сохранения энергии действует во всех системах. Он не зависит от того, какие силы действуют в системе.
Когда в системе действуют только консервативные силы, систему называют замкнутой.
А когда действуют диссипативные силы — энергия системы уменьшается на величину работы этих сил. При этом энергия системы никуда бесследно не исчезает, с помощью работы таких сил она переходит в тепловую энергию.
Трение – это диссипативная сила. Работа силы трения зависит от длины пройденного телом пути. На длину пути влияет траектория. Значит, работа диссипативных сил, в том числе, силы трения, зависит от траектории тела! Ознакомьтесь с расчетом работы силы трения.
Вспомните о том, что трением можно зажечь огонь. При этом, механическую энергию движения мы преобразовываем в тепловую энергию с помощью силы трения.
Примечания:
- Работа диссипативных сил зависит от траектории тела, а работа консервативных сил – не зависит!
- Если в системе действуют диссипативные силы, то их работа равна уменьшению энергии системы. Поэтому, работу диссипативных сил считаем отрицательной.
Консервативные и неконсервативные силы
Консервативными называются силы, работа которых при перемещении тела от точки 1 к точке 2 зависит не от траектории движения этого тела между этими точками, а только от положения этих точек. Работу выполняет только та часть силы, которая действует вдоль направления перемещения тела. В частном случае, если сила действует перпендикулярно перемещению тела, то работа такой силы на этом перемещении равна нулю. Потому что косинус прямого угла равен нулю. Работа вычисляется как интеграл по траектории движения. Но для некоторых сил оказывается, что значение этого интеграла не зависит от траектории. Эти силы принято называть консервативными.
Рассмотрим движение тела, которое свободно падает под действием силы тяжести. Какую работу выполняет эта сила при падении тела из высоты h1 на h2? Воспользуемся главной формулой для работы. В нашем случае сила тяжести направлена в ту же сторону, что и перемещение тела (сила действует вниз и тело падает тоже вниз).
Выберем вертикальную ось h, направленную вверх. Сила тяжести вдоль этой оси равна F=-mg, так как ось направлена вверх, а сила вниз.
g — ускорение свободного падения.
 Значит:
Значит:
Как видно, работа зависит только от значений h1и h2, т. е. от начальной и конечной точек движения. Поскольку h1>h2 , то сила тяжести производит положительную работу при падении тела.
Сила тяжести «помогает» телу при его движении вниз (тело просто падет). Может показаться, что это слишком простой пример, т. к. тело двигалось вниз. Но можно доказать, что по какой бы траектории не двигалось тело под действием силы тяжести, работа, выполняемая этой силой, будет зависеть только от начальной и конечной точек. Таким образом, сила тяжести – это консервативная сила [4].
Рассмотрим грузик, подвешенный на пружинке. Пусть в равновесном состоянии (когда пружина ни растянута, ни сжата) координата грузика x=0. Если мы теперь оттянем немного грузик вниз или вверх так, что его новая координата будет x, то на грузик будет действовать сила упругости, даваемая (при небольших смещениях) формулой Гука:
k — жесткость пружины.
Знак минус указывает, что сила упругости направлена в сторону, противоположную направлению смещения. Если мы оттягиваем грузик вниз, то пружина старается тянуть его вверх, и наоборот. Выберем ось x, направленную вверх (можно выбрать и вниз). Тогда работа силы упругости при движении тела из положения равновесия x=0 в точку x равна:
То есть сила упругости в этом случае производит над грузиком отрицательную работу. Это объясняется тем, что когда тело двигается в одну сторону, то сила упругости, возникающая при растяжении (или сжатии) пружины, действует на него в противоположную сторону. Сила в этом случае не помогает, а наоборот, противодействует движению грузика. Здесь показана зависимость только от конечной точки движения х. Значит, сила упругости – это тоже консервативная сила.
Сила гравитации, возникающая между двумя телами, прямо пропорциональна их массам m1 и m2 и обратно пропорциональна квадрату расстояния r между ними:
G — гравитационная постоянная. Оказывается, что вообще для гравитационных сил, их выполняемая работа не зависит от траектории и определяется начальной и конечной точками перемещения. Силы гравитации – консервативные силы.
Сила электростатического взаимодействия возникает между двумя покоящимися электрическими зарядами. Величина этой силы – это закон Кулона:
q1, q2 – электрические заряды частиц, r — расстояние между ними. Формула очень напоминает формулу для гравитационных сил (они в принципе одинаковы).
Неконсервативные силы – силы, работа которых зависит от траектории движения тела. Работа неконсервативных сил, в отличие от консервативных, зависит от формы пути. Неконсервативные силы могут совершать как положительную, так и отрицательную работу(не равняются нулю). К неконсервативным силам, совершающим отрицательную работу, относятся, например, силы трения и сопротивления при движении тела в жидкости или газе. Это обусловлено тем, что направление действия этих сил и направление перемещения тела противоположны.
Сила трения возникает при движении одного тела по поверхности другого и равна:
μ — коэффициент трения, N — сила реакции опоры. Коэффициент трения зависит от материала тел, состояния их поверхности и т. д., но он не зависит от площади трущихся тел.
Сила сопротивления воздуха возникает, когда тело какой-то формы движется со скоростью v в воздухе. Для некоторого диапазона скоростей эта сила пропорциональна квадрату скорости:
k – коэффициент пропорциональности, зависящий от формы движущегося тела и его прочих характеристик. Эта сила направлена против движения тела. Для неконсервативных сил невозможно ввести потенциальную энергию, следовательно, не имеет смысла говорить о полной механической энергии E=T+U и о ее сохраняемости. Значит, при действии неконсервативных сил, полная (механическая) энергия не сохраняется.
Механическая энергия сохраняется в той системе тел, где действуют только консервативные силы. Проще говоря, к неконсервативным силам относятся те, что «тратят» энергию системы на какие-то другие процессы. Это могут быть, например, явления превращения кинетической энергии в тепло.
Консервативные и неконсервативные силы.
Консервативными называются силы, работа которых не зависит от формы траектории, а определяется только положением её начальной и конечной точек.
 Работа на замкнутой траектории равна нулю:
Работа на замкнутой траектории равна нулю:
К консервативным силам относятся: сила тяжести, гравитационная сила, сила упругости и другие силы.
Примером может служить скольжение без трения материальной точки по гладкой наклонной плоскости. Очевидно, эта работа равна A1,2=mgscosα, или
A1,2=mg(h1−h2)=mgh1−mgh2, (1.24.1)
Формула (1.24.1) остается справедливой и при перемещении вдоль произвольной кривой, например по пути .Это станет очевидным, если разбить весь путь горизонтальными плоскостями на малые участки, каждый из которых может быть принят за прямолинейный. Применив к каждому участку формулу (1.24.1) и сложив полученные работы, мы придем к прежнему результату (1.24.1). Если вместо пути взять любой другой путь между теми же начальным и конечным положениями 1 и 2, то работа силы тяжести не изменится, так как она определяется только разностью высот h1−h2, которая от формы пути не зависит. Таким образом, работа силы тяжести не зависит от формы пути, а определяется только начальным и конечным положениями перемещающейся точки.
Неконсервативнымисилами называются силы, работа которых зависит от пути перехода тела или системы из начального положения в конечное.
Работа этих сил на замкнутой траектории отлична от нуля. К неконсервативным силам относятся: сила трения, сила тяги и другие силы.
Силу, с которой тело притягивается к Земле под действием поля тяготения Земли, называют силой тяжести. По закону всемирного тяготения на поверхности Земли (или вблизи этой поверхности) на тело массой m действует сила тяжести: Fт=GMm/R 2 (2.28)
Если на тело действует только сила тяжести, а все другие силы взаимно уравновешены, тело совершает свободное падение. Согласно второму закону Ньютона и формуле (2,28) модуль ускорения свободного падения g находят по формуле: g=Fт/m=GM/R 2 . (2.29)
Из формулы (2.29) следует, что ускорение свободного падения не зависит от массы m падающего тела, т.е. для всех тел в данном месте Земли оно одинаково. Из формулы (2.29) следует, что Fт = mg. В векторном виде: Fт=mg (2.30)
При деформации тела возникает сила, которая стремится восстановить прежние размеры и форму тела. Эта сила возникает вследствие электромагнитного взаимодействия между атомами и молекулами вещества. Ее называют силой упругости.
При малых деформациях (|x| 0. Если тело переместилось из точки, расположенной на высоте h1, в точку, расположенную на высоте h2 от начала координатной оси OY ,то сила тяжести совершила работу
| A = –mg (h2 – h1) = –(mgh2 – mgh1). |
Эта работа равна изменению некоторой физической величины mgh, взятому с противоположным знаком. Эту физическую величину называют потенциальной энергией тела в поле силы тяжести
Она равна работе, которую совершает сила тяжести при опускании тела на нулевой уровень. Работа силы тяжести равна изменению потенциальной энергии тела, взятому с противоположным знаком.
|
 (11)
(11) (12)
(12)
 Или
Или 




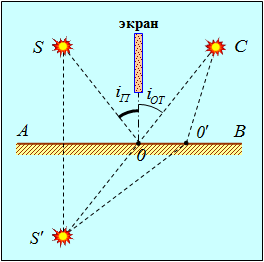
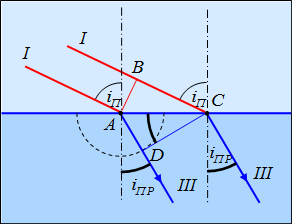
 в падающем пучке. Углом падения называют угол
в падающем пучке. Углом падения называют угол  между нормалью п к поверхности раздела и падающим лучом I. Плоский фронт AD падающей волны сначала достигнет границы раздела двух сред в точке А, которая станет источником вторичных волн. Согласно принципу Гюйгенса, из нее, как из центра, будет распространяться сферическая волна. Через время
между нормалью п к поверхности раздела и падающим лучом I. Плоский фронт AD падающей волны сначала достигнет границы раздела двух сред в точке А, которая станет источником вторичных волн. Согласно принципу Гюйгенса, из нее, как из центра, будет распространяться сферическая волна. Через время ,
, , луч
, луч  из падающего пучка придет в точку С, которая в этот момент времени
из падающего пучка придет в точку С, которая в этот момент времени  также станет источником вторичной волны. Но, к этому моменту вторичная сферическая волна, распространяющаяся из точки А, уже будет иметь радиус
также станет источником вторичной волны. Но, к этому моменту вторичная сферическая волна, распространяющаяся из точки А, уже будет иметь радиус  (как и должно быть:
(как и должно быть:  ). Мы знаем теперь положение двух точек фронта отраженной волны — С и В. Чтобы не загромождать рисунок, мы не показываем вторичных волн, испущенных точками между А и С, но линия CD будет касательной (огибающей) ко всем из них. Стало быть, CВ действительно является фронтом отраженной волны. Направление ее распространения (лучи II и
). Мы знаем теперь положение двух точек фронта отраженной волны — С и В. Чтобы не загромождать рисунок, мы не показываем вторичных волн, испущенных точками между А и С, но линия CD будет касательной (огибающей) ко всем из них. Стало быть, CВ действительно является фронтом отраженной волны. Направление ее распространения (лучи II и  ) ортогонально фронту CD. Из равенства треугольников ABC и ADC вытекает равенство углов
) ортогонально фронту CD. Из равенства треугольников ABC и ADC вытекает равенство углов


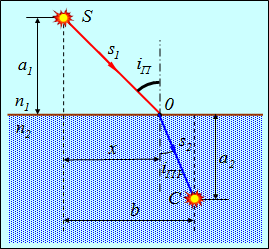
 показатель преломления среды, в которой распространяется преломленная волна,
показатель преломления среды, в которой распространяется преломленная волна,  показатель преломления среды, в которой распространяется падающая волна.
показатель преломления среды, в которой распространяется падающая волна. , вдоль направления I со скоростью
, вдоль направления I со скоростью
 , а скорость распространения
, а скорость распространения


 и
и  следует
следует
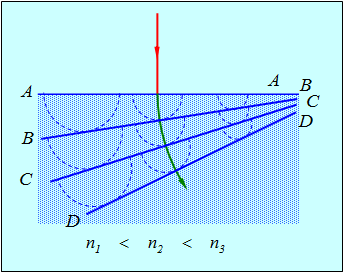
 испущенные вторичные сферические волны достигают точек на расстоянии
испущенные вторичные сферические волны достигают точек на расстоянии  от фронта АА. Поскольку показатель преломления среды растет слева направо, эти расстояния убывают слева направо. Огибающая к вторичным волнам — новый фронт ВВ — повернется. Если теперь взять точки фронта ВВ за источники вторичных волн, то за время
от фронта АА. Поскольку показатель преломления среды растет слева направо, эти расстояния убывают слева направо. Огибающая к вторичным волнам — новый фронт ВВ — повернется. Если теперь взять точки фронта ВВ за источники вторичных волн, то за время  они породят волны, образующие фронт СС. Он еще более повернут. Его точки порождают фронт DD и т. д. Проводя нормаль к волновым фронтам в разные моменты времени, получаем путь светового луча в среде с переменным показателем преломления (зеленая линия). Видно, что луч искривляется в сторону увеличения показателя преломления. Аналогия: если притормозить левые колеса автомобиля, его повернет налево. Для света степень «торможения» растет с ростом показателя преломления среды:
они породят волны, образующие фронт СС. Он еще более повернут. Его точки порождают фронт DD и т. д. Проводя нормаль к волновым фронтам в разные моменты времени, получаем путь светового луча в среде с переменным показателем преломления (зеленая линия). Видно, что луч искривляется в сторону увеличения показателя преломления. Аналогия: если притормозить левые колеса автомобиля, его повернет налево. Для света степень «торможения» растет с ростом показателя преломления среды:  .
.  свету требуется время
свету требуется время